


起点低、使用便捷的电路板组装机械臂整机SmartWing BA
汽车和家用电器中所使用的电路板需经过“物料收货”、“表面贴装”、“插装”、“组装、包装”这些工序之后再出厂。(参考图1)
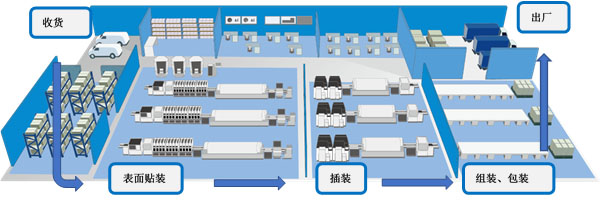
图1
由于贴片机及其周边设备的发展,这些工序中的表面贴装工序的自动化已经有了很大的进步。可是,由于连接器、铝电解电容等异形元件的供应包装不均一,需插装的元件数量也少,所以插装这些元件的工序仍然采用手工方式。这使得品质和生产率成了课题。
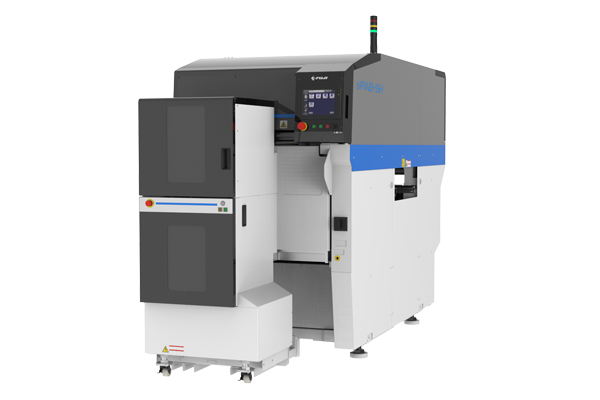
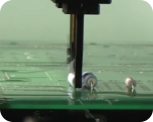
为了解决这类客户在插件工序遇到的品质和生产率问题,本公司推出了SmartWing BA。它是一款把水平多关节机械臂和影像系统整合到了一起的机械臂整机。它充分考虑到了成本和使用便利性。
SmartWing BA主要有以下这些特点。
- 只需选配标准的周边单元,就可以对应各种元件。
- 能以散料或简易料盘等包装形式直接供料(即不改变包装)。
- 图形用户界面直观易懂,任何人都能轻松编程。
- 机械臂整机构造相同,易于投产、移机、推广到其他工厂。
SmartWing BA的平台部分由水平多关节机械臂(最大搬运重量:6kg,最大臂展:700mm)以及2种元件识别相机(安装在机械臂前端的机械臂相机、安装在基座上的零件相机)构成。(图2)
机械臂相机用于识别电路板上的插装位置以及供应的元件的抓取位置;零件相机用于先从元件下表面进行图像识别,然后再对元件形状、插脚位置/间距以及元件极性进行识别。利用这2台相机的图像识别信息和机械臂相结合的补正技术来实现精度要求较高的插装作业的自动化。
本公司准备了各种标准的周边单元(如图2所示)。客户只需根据插件选配所需单元,就可以完成设备的系统集成。
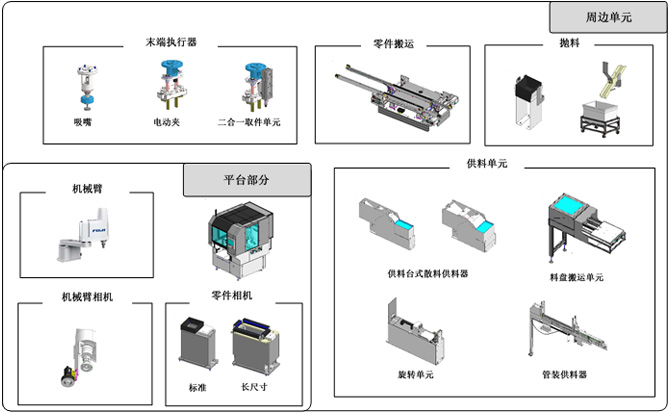
图2
无需花功夫变更包装即可使插件工序实现自动化
异形插件的供料包装经常是料腔空隙很大的料盘或散装的形式。
为了自动插装这些元件,必须将它们重新装入专用料盘内。这对提高自动化率来说是一个障碍。
由于SmartWing BA配备了机械臂相机,所以能对整个零件供应区进行图像识别。因此,即使是料腔空隙很大的料盘上的元件,也可以准确地抓取元件的中心部位。另外,针对散料的话,由于相机可以对供料台式散料供料器的供料台上的多个零件进行图像识别,所以可以只抓取处于可抓取姿势的零件。
由于具备这些功能;所以即使元件供应包装不均一,也可以直接供应并插装(即无需改变包装)。(图3)

图3
无需示教、编程知识。任何人都可以轻松创建生产程序
生产程序创建借助生产程序创建工具Job Editor来完成。
只要用装有Job Editor的计算机以数值的形式输入“零件信息(与零件形状相关的信息)”、“电路板信息(与插装坐标相关的信息)”、“零件供应信息(与零件的吸取位置相关的信息)”并通过下拉菜单做出选择,就可以完成动作程序的创建。它和一般的水平多关节机械臂不同,无需示教。只需输入数值,就可以轻松创建和编辑动作程序。(图4)
影像处理数据通过机器上搭载的“Shape Editor”来完成。首先,根据Shape Editor的图形用户界面(GUI)输入设定值。接着,通过机器对零件进行拍摄,从拍摄的零件图像中自动提取零件和背景的颜色、零件轮廓和插脚前端的形状。最后,用一个矩形围住零件的图像。这样,影像处理数据就创建好了(图5)
使用Job Editor和Shape Editor之后,即使操作员没有示教、编程方面的专业知识,也可以轻松追加或变更零件类型。
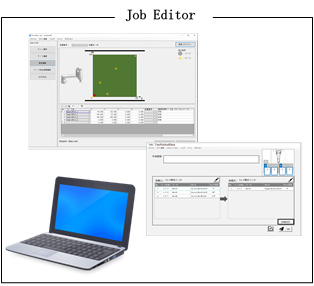
图4

图5
机械臂整机构造相同,易于投产、移机、推广到其他工厂
由于SmartWing BA是整机形式,所以机器之间不存在差异。客户能以单机形式使用。因此,无论是新装机还是复制生产线或移机时重新投产,都可以用同一程序进行生产,顺利地在短时间内实现投产。(图6)
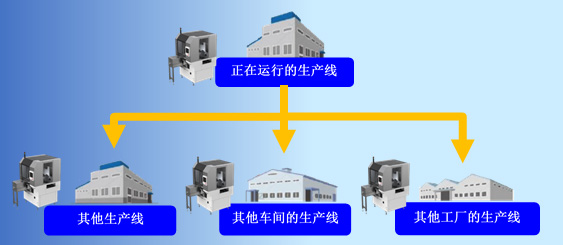
图6
凭借这些特点,SmartWing BA不仅可以使插件工序实现自动化,还可以用于准备工序(例如:分配所需数量的元件)、组装前的预组装的自动化等工厂内的各种场所和用途。
以上就是能从低起点开始插装工序自动化的电路板组装机械臂整机SmartWing BA的介绍。
您可以在本公司展厅观看SmartWing BA是如何工作的。如果您无法莅临本公司展厅参观,那么可以观看在线演示的介绍。
关于产品的更多信息以及参观申请,欢迎咨询。